5AHITN 2021/22
Ein selbstfahrendes Auto mit Indoor-Navigationssystem
Ausgangslage:
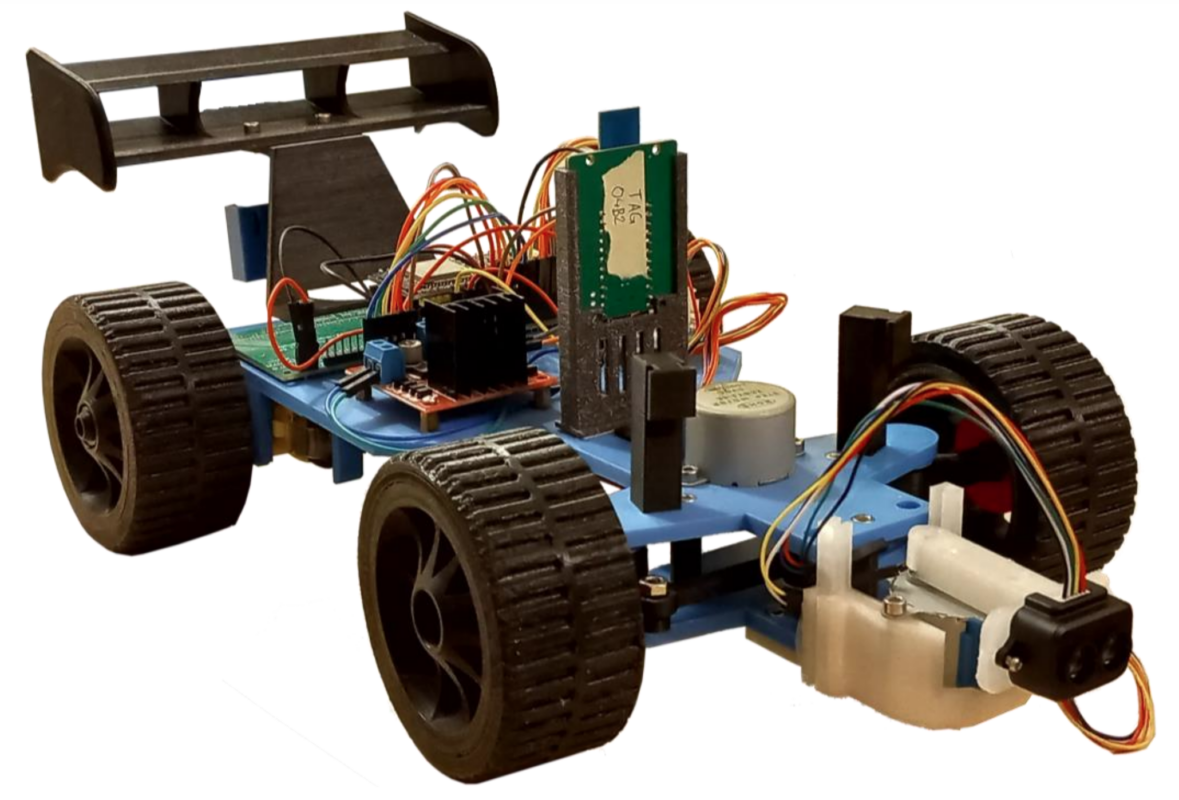
Der Alphabot ist ein ferngesteuertes Roboterauto, das am SZU im Freigegenstand Programmierwerkstatt (2018-2021) entwickelt wurde. Im Rahmen dieser Arbeit soll diese Basis um ein Positionierungs-, Indoor-Navigations- und Kartografierungssystem erweitert und abschließend dokumentiert werden. Der Alphabot soll im Stande sein, autonom Hindernisse zu umfahren, um eine gewünschte Position zu erreichen.
Umsetzung:
Die Diplomarbeit „Alphabot“ handelt von einem selbstgebauten, fernsteuerbaren Auto, welches sowohl manuell als auch autonom fahren kann. Der Sinn der Diplomarbeit liegt darin, den Schüler*innen der Schule ein gut dokumentiertes Hardwareprojekt zur Verfügung zu stellen, um sich diesem Thema besser nähern zu können. Das Projekt soll den Alphabot, welcher schon seit 2018 im Freigegenstand Programmierwerkstatt entwickelt wird, um ein Positionierungssystem, Indoor-Navigation und Hinderniskartografierung erweitern. Die Diplomarbeit ist in zwei verschiedene Implementierungen des Fahrzeugs unterteilt, eine der Raspberry Pi-Variante, für welche Marcel Fürpaß zuständig ist und eine der ESP32-Variante, für welche Filip Schauer zuständig ist.
Für die Kommunikation zwischen Clients und Alphabot wurde ein einheitliches Protokoll für beide Varianten erstellt. Dieses Protokoll kommt in zwei verschiedenen Ausführungen. Eine Ausführung des Protokolls baut auf einer bestehenden TCP-Verbindung über WLAN auf. Der große Vorteil dieses Vorgehens ist die einfache Implementierung aufgrund der Zuverlässigkeit von TCP. Die andere Ausführung des Protokolls basiert auf Bluetooth Low Energy (BLE). Wie der Name verrät, ist dies der stromsparendere Weg. Jedoch ist die Implementierung aufgrund der geringeren Übertragungszuverlässigkeit und diversen Einschränkungen deutlich komplizierter.
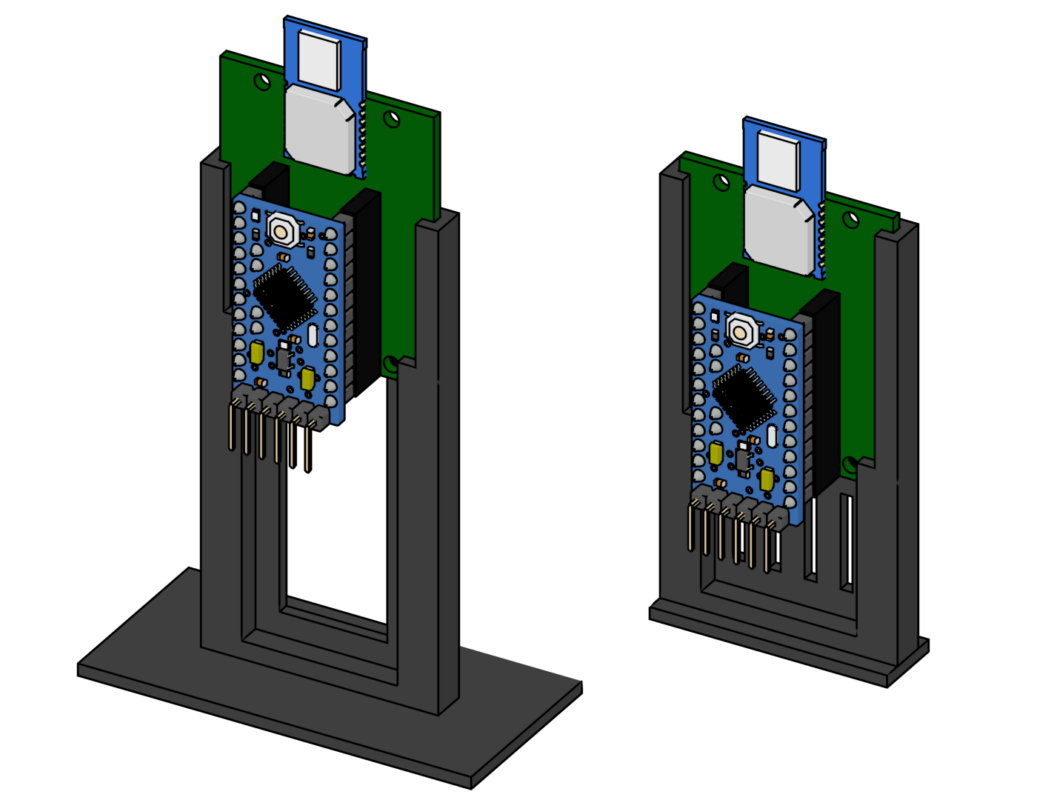
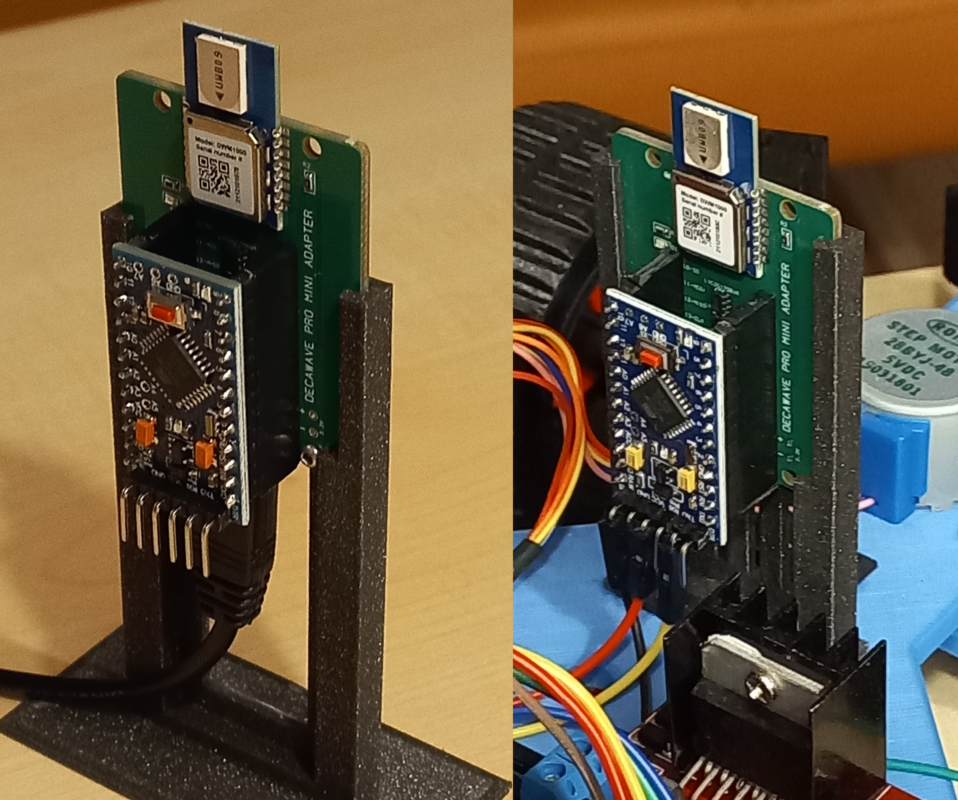
Ebenso wurde ein Positionierungssystem auf beiden Varianten des Alphabots erfolgreich implementiert und getestet. Für die Messungen kamen dabei DW1000-Chips zum Einsatz, mit denen die Distanzen zu festgelegten Punkten im Raum gemessen wurden. Mit einem mathematischen Vorgang namens Trilateration wird aus den Messungen eine Position errechnet. Im Rahmen der Arbeit wurde die Positionsermittlung weitgehend optimiert. Unter anderem wurde auch ein Kalman-Filter eingesetzt und Messungen von anderen Sensoren in die Positionierung einbezogen.
Außerdem wurde ein Xamarin Client für Android und Universal Windows Program (UWP) erstellt. Dieser ermöglicht eine Ansteuerung des Fahrzeugs, sowie eine grafische Darstellung der Positionierung des Alphabots.
Die Indoor-Navigation funktioniert ausschließlich auf der ESP32-Variante. Hierfür wird zuerst mit einem A*-Algorithmus der Weg zu einem benutzerdefinierten Ziel mit Berücksichtigung von Hindernissen ausgerechnet. Die aktuelle Position wird dabei aus dem Positionierungssystem entnommen. Das Navigationssystem interpretiert die Ergebnisse des A*-Algorithmus und steuert auf dieser Basis das Fahrzeug autonom.
Downloads: Poster, Diplomarbeit
Team: Filip Schauer, Marcel Fürpaß
Betreuer: Mag. Johannes Neuhofer, DI Michael Vogel, Ing. Thomas Gürth