5AHWII 2025/26
Innovation auf vier Rädern: Unser autonomes Elektro-Fahrzeug
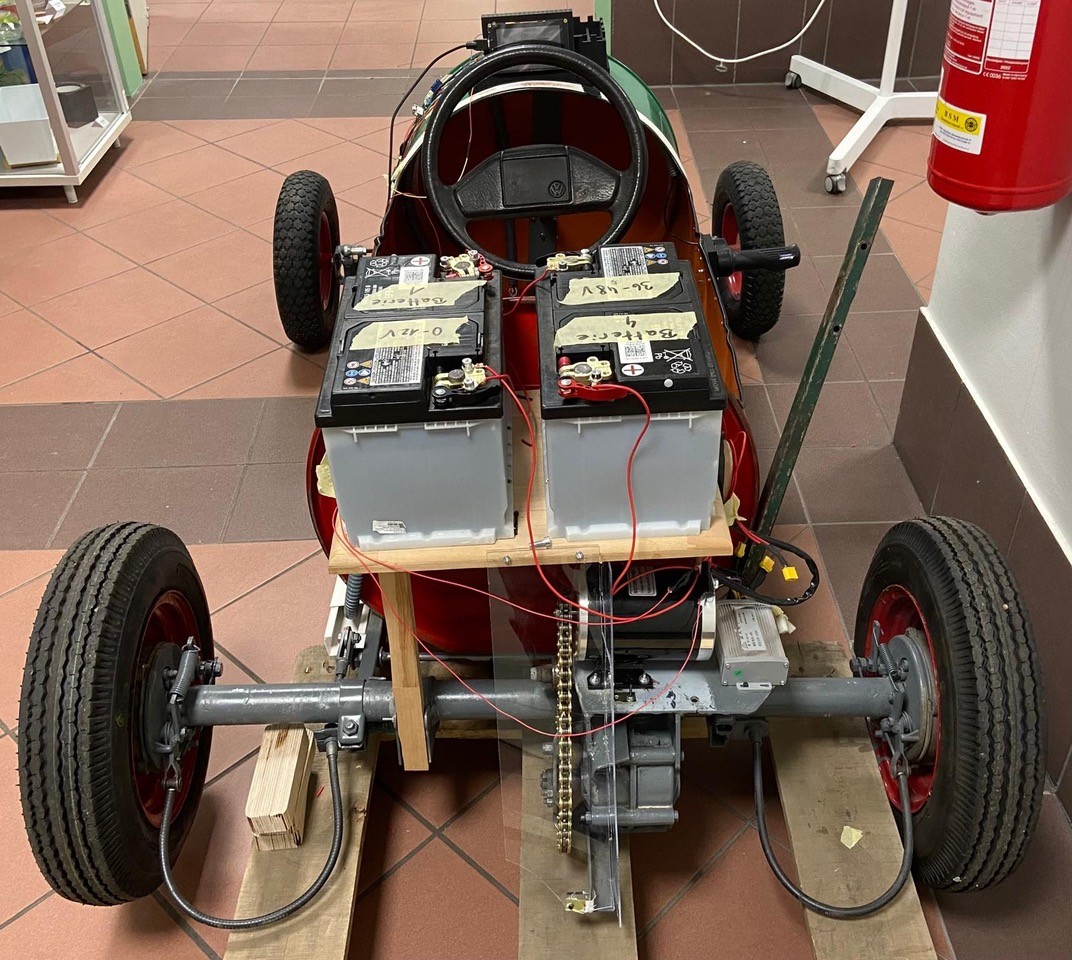
Nachhaltigkeit trifft auf High-Tech: Im Rahmen unserer aktuellen Diplomarbeit am SZU haben wir ein Fahrzeug entwickelt, das zeigt, wie die Mobilität der Zukunft aussehen könnte. Mit einem Raspberry Pi als Gehirn und einem sauberen Elektroantrieb setzen wir ein klares Zeichen für grüne Innovation.
Von der Idee zur nachhaltigen Umsetzung
Das Ziel unseres Projekts war von Anfang an klar: Ein autonom agierendes Fahrzeug zu konstruieren, das ohne menschlichen Eingriff sicher navigieren kann.
Durch den Fokus auf einen Elektromotor konnten wir nicht nur den ökologischen Fußabdruck des Prototyps minimieren, sondern auch die präzise elektronische Ansteuerung des Antriebs optimieren, was für ein autonomes System von entscheidender Bedeutung ist. Diese Entscheidung erwies sich als Glücksfall für die technische Ausrichtung des Projekts.
Das technische Herzstück: Raspberry Pi & Servos
Das Herzstück des Fahrzeugs stellt der Raspberry Pi dar. Dieser verarbeitet die Daten der Sensoren und berechnet in kürzester Zeit die optimale Fahrlinie.
Besonderes Augenmerk haben wir auf die Mechanik der Lenkung gelegt:
- Präzise Lenkung: Die Lenkimpulse werden direkt vom Raspberry Pi an leistungsstarke Servomotoren weitergegeben.
- Reaktionsgeschwindigkeit: Durch die direkte Ansteuerung der Servos erreicht das Fahrzeug eine hohe Manövrierfähigkeit, die für das autonome Ausweichen von Hindernissen unerlässlich ist.
- Effizienz: Das Zusammenspiel zwischen dem effizienten Elektromotor und der exakten Servolenkung sorgt für einen minimalen Energieverbrauch bei maximaler Kontrolle.
Ein Projekt mit Zukunft
Dieses Projekt vereint die Kernkompetenzen unserer Ausbildung: Informatik, Elektronik und Mechanik. Wir zeigen damit, dass technische Höchstleistung und ökologische Verantwortung keine Gegensätze sein müssen. Unser autonomes Auto ist nicht nur ein Beweis für unser technisches Know-how, sondern auch ein Plädoyer für nachhaltige Lösungen im Maschinenbau und in der IT.
Projektteam: Jakob-Lars Kurzmann, Simon Poppe, Alexander Posel, Moritz Trapl
Projektbetreuer: DI Martin Müller